Low-voltage artificial muscles allow significant step-up in the performance of flying microrobots
Cambridge, Massachusetts – Massachusetts Institute of Technology (MIT) researchers have reported a potentially significant advance with the development of microdrones, equipped with wings powered by artificial muscles in the form of elastomer-based actuators.
The development, claims MIT, could pave the way for futuristic applications, for example, swarms of the insect-sized robots that pollinate fields of crops or search for survivors buried in collapsed buildings.
Key to the innovation is a novel fabrication technique that builds actuators with a hugely extended component lifespan and increases the robot’s performance and payload compared to existing models.
According to the MIT researchers, by producing artificial muscles with fewer defects, the microdrones can operate with 75% lower voltage while carrying 80% more payload than current versions.
“This robot, weighing less than a gramme, flies for the longest time with the smallest error during a hovering flight,” said Kevin Chen, assistant professor in the MIT department of electrical engineering and computer science,
“The take-home message is that soft robots can exceed the performance of rigid robots,” added Chen, who is also head of the soft and micro robotics laboratory in the research laboratory of electronics.
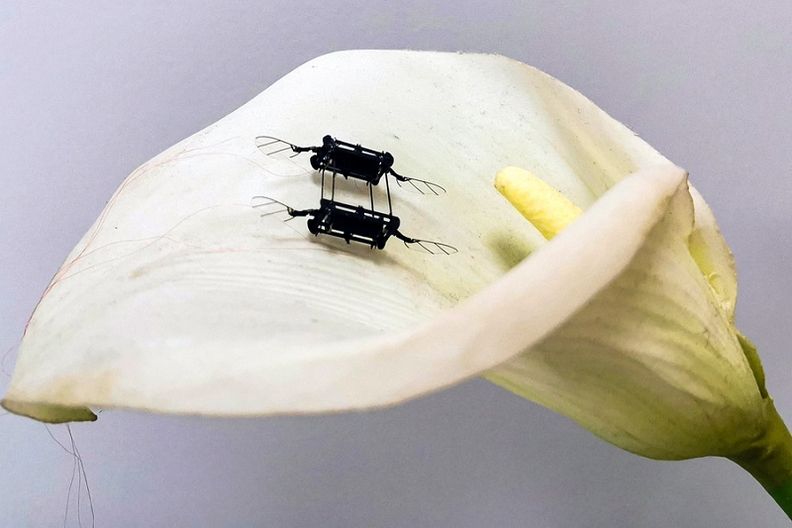
The rectangular microrobot has four sets of wings, each driven by muscle-like actuators, made from layers of elastomer sandwiched between two very thin electrodes and rolled into a cylinder.
When voltage is applied, the electrodes squeeze the elastomer to produce enough mechanical strain to flap the wing. The more surface area the actuator has, the less voltage is required.
The artificial muscles were, therefore, built by alternating as many ultrathin layers of elastomer and electrode as possible: eventually creating an actuator with 20 layers, each of which is 10 micrometers in thickness.
To get there, the ream had to overcome problems in the spin-coating process, in which elastomer is poured onto a flat surface and rapidly rotated to pull the film outward and make it thinner.
“In this process, air comes back into the elastomer and creates a lot of microscopic air bubbles. The diameter of these air bubbles is barely 1 micrometer, so previously we just sort of ignored them,” said Chen.
“But when you get thinner and thinner layers, the effect of the air bubbles becomes stronger and stronger. That is traditionally why people haven’t been able to make these very thin layers,” he explained.
The MIT team found that a vacuuming process applied immediately after spin coating, while the elastomer was still wet, removed the air bubbles before the elastomer dried.
Removing these defects increased the power output of the actuator by more than 300% and significantly improves its lifespan, according to Chen.
The researchers also optimised the thin electrodes, which are composed of carbon nanotubes (CNTs). While higher concentrations of CNTs increase the actuator’s power output and reduce voltage, dense layers also contain more defects.
For instance, the carbon nanotubes have sharp ends and can pierce the elastomer, which causes the device to short out, reported Chen, adding that after much trial and error, an optimal concentration was found.
The resulting 20-layer actuator was found to require less than 500 volts to operate and exert enough power to give the robot a lift-to-weight ratio of 3.7 to 1. This, said MIT, means it can carry items nearly three times its weight.
During a 20-second hovering test flight, the hovering robot held its position more stably, with the 20-layer actuator still working smoothly after being driven for more than 2 million cycles. This, said Chen, greatly exceeded the lifespan of other actuators.
The team next aims to build actuators in a cleanroom and leverage nanofabrication techniques - to overcome current limits to how thin they can make the layers, and on the spin-coating speed.
And, having produced 10-micrometer actuator layers, Chen hopes to reduce the thickness to only 1 micrometer, which would open the door to many applications for these insect-sized robots.
In response to ERJ's enquiry, an MIT spokeswoman said the elastomer used by the research team was Elastosil P7670 - a room temperature curing soft elastomer produced by Wacker Chemie.
Lead image courtesy of MIT research team.